| Essay about: | Эссе на тему: | ||||||||||||
The Secret of steady walking of an anthropomorphic robot on two legs at automatic regime. |
|
Секрет устойчивого хождения антропоморфного робота на двух ногах в автономном режиме. |
|||||||||||
|
Version of 17 november 2018 |
|||||||||||||
|
Introduction. Over the past half century, many scientific organizations have, with varying success, tried to solve the problem with a walking of anthropomorphic robots on two legs. Someone in this area has succeeded, but most researchers have failed in this field.
Certain reasons (personal interest) prompted me to consider this issue. For some people my reasoning may seem too naive (obvious), but for others men (those who have failed in designing two-legged robots), my thoughts can be a revelation.
I will not present here a detailed theory of walking on two legs, because This does not make sense - a detailed theory radically depends on the specific model of the robot, on its kinematics, dynamic characteristics and some other design features. I will consider the general situation of autonomous walking in a bipedal robot, of physics. It is possible that somewhere in the multi-ton blockages of scientific literature similar ideas already are being set forth, but the failures of a large number of researchers who tried to teach robots to walk on two legs suggest that the described material will be very interesting for many specialists.
|
Вступление. За последние полвека многие научные организации с переменным успехом пытались решить проблему хождения антропоморфных роботов на двух ногах. Кто-то в этой области преуспел, но большинство исследователей потерпели на этом поприще неудачу. Определенные причины (личный интерес) подвигли меня на рассмотрение этого вопроса. Кому-то мои рассуждения, приведенные ниже, могут показаться слишком наивными (очевидными), а для других (тех, кто потерпел неудачу при конструировании двуногих роботов) мои размышления могут быть откровением.
Я не буду здесь излагать подробную теорию хождения на двух ногах, т.к. это не имеет смысла - подробная теория кардинальным образом зависит от конкретной модели робота, от его кинематики, динамических характеристик и некоторых других конструктивных особенностей. Я рассмотрю общую ситуацию хождения в автономном режиме двуногого робота, физику. Возможно, где-то в многотонных завалах научной литературы излагаются аналогичные идеи, но неудачи большого числа исследователей, пытавшихся научить ходить роботов на двух ногах, дают основание предполагать, что для многих специалистов изложенный материал будет весьма интересным. |
||||||||||||
|
So, let's begin: In the book “The entertaining Physics”, author Ya.I. Perelman, we can be see the definition of a bipedal vertical walk (well, and accordingly, this also applies to running to the full): |
Итак, начнем: В книге Я.И. Перельмана «Занимательная физика» можно встретить такое определение двуногой вертикальной ходьбы (ну, и соответственно, к бегу это относится тоже в полной мере): |
||||||||||||
|
|
||||||||||||
|
Here are the relevant pages from this book: |
Вот соответствующие страницы из этой книги: |
||||||||||||
|
|
|||||||||||||
| By means a yellow marker, I singled out the most interesting moments for us - the definition of a bipedal walking (running) and vertical stability of elongated (upright) bodies. The definition given by Perelman is undoubtedly correct, but there are small nuances. To understand them, first we will see one comic video: |
Желтым маркером я выделил наиболее интересные для нас моменты - определение двуногой ходьбы (бега) и вертикальной устойчивости вытянутых (вертикально стоящих) тел. Определение, данное Перельманом, несомненно, правильное, но есть небольшие нюансы. Чтобы их понять вначале посмотрим одно шуточное видео: |
||||||||||||
|
|
|||||||||||||
| Of course, this is a joke - in practice, people do not go like this (unless they try to parody unfinished robots). Yes, the above video is a joke. However, now let's look at two other videos from scientific organizations, and we will see analogies (these projects failed and were closed - either because of lack of money, or because of the instability of the gait of robots): |
Конечно, это шутка – на практике люди так не ходят (если только они не пытаются парадировать недоделанных роботов). Да, указанное выше видео – шутка. Однако посмотрим теперь два других видео из научных организаций, и мы увидим аналогии (эти проекты потерпели неудачу и были закрыты – или из-за нехватки денег, или по причине неустойчивости походки роботов): |
||||||||||||
|
|||||||||||||
|
|||||||||||||
Or here one more example of wrong gait of the robot - the robot in process of move forward even contrives fall to back. This all because that on each step there is a full carry of the center of weights on a supporting leg and a stop. - The programmers of this robot do not understand dynamics of walking: |
Или вот ещё один пример неправильной походки робота - при движении вперед робот даже умудряется падать назад. Это всё из-за того, что на каждом шаге происходит полный перенос центра масс на опорную ногу и остановка. - Программисты этого робота не понимают динамику ходьбы: |
||||||||||||
|
|
|
|||||||||||
|
Let us examine in detail this style of walking with a complete transfer of the center of mass to the supporting leg. To do this, I will use diagrams where “footprints” will be displayed - the soles of the two-legged robot (the soles are shown in black), and the center of mass is indicated by a red bold dot. |
Разберем подробно такой стиль ходьбы с полным переносом центра масс на опорную ногу. Для этого я буду использовать диаграммы, где будет отображены «следы» - ступни ног двуногого робота (ступни показаны черным цветом), а центр масс – обозначен красной жирной точкой.
|
||||||||||||
|
Initially, the robot is standing, the center of mass (red dot) is located exactly in the middle between the soles. |
Вначале робот стоит, центр масс (красная точка) находится точно посредине между ступнями. |
||||||||||||
|
|
|||||||||||||
|
Now we will consider of move of the robot. Suppose what the robot (its center of mass) to move “From point A to point B” - from left to right. Let the robot take the first step, as is customary in the military, by the left foot: |
Теперь непосредственно рассмотрим ходьбу робота. Допустим, нам необходимо чтобы робот (его центр масс) двигался «Из пункта А - в пункт В» — слева - направо. Пусть первый шаг, как это принято у военных, робот делает с левой ноги: |
||||||||||||
|
|
|||||||||||||
|
Diagram # 1. |
|||||||||||||
|
We see that for this, the robot first completely transfers the center of mass to the right foot - we denote the indicated action by the number 1 (red arrow), then he raises the left foot and sets it in front itself - action No. 2 (blue arrow). Then the robot completely transfers the center of mass to the left foot - action No. 3, and ... robot stop... After that, the robot lifts the right leg and sets it in front of itself - action number 4. Next, the robot transfers the center of mass completely on the right leg - action number 5 and ... stops again (dampens lateral movement and forward movement). Well, etc. - the legs of the robot are alternately rearranged in straight, parallel to the direction “From point A to point B”, the center of mass moves in a zigzag with a complete transfer of the center of mass to the supporting leg and with braking at each step.
This type of gait is not only slow (after each transfer of the center of mass, the robot has to quench the speed of movement, and then accelerate in the next step and spend time for this), but this gait is instable. To understand the causes of the instability of the gait, we will attract the help of the “cubic's man”:
|
Мы видим, что для этого робот вначале полностью переносит центр масс на правую ногу - обозначим указанное действие цифрой № 1 (красная стрелка), затем поднимает левую ногу и ставит её перед собой – действие № 2 (синяя стрелка). Затем робот полностью переносит центр масс на левую ногу – действие № 3 и… останавливается... После этого робот поднимает правую ногу и ставит её перед собой – действие № 4. Далее робот переносит полностью центр масс на правую ногу – действие № 5 и… снова останавливается (гасит боковое движение и движение вперед). Ну, и т.д. – ноги робота поочередно переставляются по прямым, параллельным направлению «Из пункта А - в пункт В», центр масс движется по зигзагу с полным переносом центра масс на опорную ногу и торможением на каждом шаге.
Данный тип походки не только медленный (после каждого переноса центра масс роботу приходится гасить скорость движения, а потом на следующем шаге ускоряться и затрачивать на всё это время), но такая походка неустойчива. Чтобы понять причины неустойчивости походки привлечём на помощь «кубического человечка»:
|
||||||||||||
|
|
|||||||||||||
|
The red circle marks its center of mass. Such a "cubic man" can be in a vertical position (not to fall), if the vector of gravity, drawn from the center of mass, will not extend beyond the bearing area of his legs. |
Красным кружком отмечен его центр масс. Такой кубический человечек может находиться в вертикальном положении (не падать), если вектор силы тяжести, проведенный из центра масс, при наклонах не будет выходить за площадь опоры его ног.
|
||||||||||||
|
Now imagine, as it was in the above videos with walking robots, that our "cubic little man", when walking, completely transfers the center of mass to the supporting leg: |
Теперь представим, как это было в указанных выше видеороликах с шагающими роботами, что наш кубический человечек при ходьбе полностью переносит центр масс на опорную ногу:
|
||||||||||||
|
|
|||||||||||||
|
Here in the figure, I knowingly a little exaggerate the situation, putting the "cubic little man" not just on one leg, but in such a way that the vector of gravity passes exactly over the edge of his supporting leg. This was done advisedly, to most clearly show the causes of instability - the slightest external random influence-disturbance (shown in the figure how a little breeze) is enough to start the irreversible fall of a "cubic man": |
Здесь на рисунке я специально немного утрирую ситуацию, поставив кубического человечка не просто на одну ногу, а таким образом, чтобы вектор силы тяжести проходил точно через край его опорной ноги. Это сделано специально, чтобы наиболее наглядно показать причины неустойчивости – малейшего внешнего случайного воздействия-возмущения (показано на рисунке как легкий бриз) достаточно для начала необратимого падения кубического человечка:
|
||||||||||||
|
|
|||||||||||||
|
Of course, soles of person’s or a robot's has certain footing areas other than zero, so the picture shown here with a "cubic little man" set on angle of the sole is not entirely correct, but still quite acceptable, especially since sometimes we walk on stilts, which area of support can be quite small. |
Конечно, у человека или робота стопы ног имеет определенные площади опоры, отличные от нуля, поэтому приведенный здесь рисунок с кубическим человечком, поставленным на угол ноги, не совсем корректный, но всё же вполне допустимый, тем более что иногда мы ходим на ходулях, у которых площадь опоры может быть весьма небольшой. |
||||||||||||
|
|
|||||||||||||
| Before the invention of bicycles, stilts were even used professionally - by postmen in the countryside of some countries of Europa: |
До изобретения велосипедов ходули даже использовались профессионально - почтальонами сельской местности некоторых западных стран: |
||||||||||||
|
|
|||||||||||||
|
Another thing is important - the above images with "cubic man" make it possible to understand the reason for the instability of this gait style.
Now consider another style of walking - let's call it the “Gait of the tightrope-walker”. |
Важно другое - приведенные рисунки с кубическим человечком позволяют понять причину неустойчивости данного стиля походки. Теперь рассмотрим еще один стиль походки – назовем её «Походка канатоходца». |
||||||||||||
|
|
|||||||||||||
|
The diagram for this gait style is shown below: |
Диаграмма этого стиля походки показана ниже: |
||||||||||||
|
|
|||||||||||||
|
Diagram # 2. |
|||||||||||||
|
— The center of masses in this style moves strictly along one line in the direction “From point A to point B”. At each step of the legs are alternately substituted below under the center of mass, and describing the arc in space, I show these moves on the diagram by a blue arrows. Compare with diagram # 1, where the center of mass moved in a zigzag, and the soles of the legs were rearranged in straight lines. This style of walking is also unstable - the “triangular man” will allow us to understand this: |
— Центр масс при этом стиле движется строго по одной линии в направлении «Из пункта А - в пункт В». Ноги при каждом шаге поочередно подставляются под центр масс, описывая в пространстве дуги, на диаграмме их движения показаны синим цветом. Сравните с диаграммой № 1, где центр масс двигался зигзагом, а стопы ног переставлялись по прямым линиям. Данный стиль походки тоже неустойчивый – понять это нам позволит «треугольный человечек»: |
||||||||||||
|
|
|||||||||||||
| I am again exaggerating - the support area of such a triangular man is minimal and the center of mass hanging over it can tip over from the slightest random disturbance.
And now let's consider the most stable (from a physical point of view) style of a two-legged walk - “Sailor's gait”. This walking style is was mentioned by Ya.I. Perelman on page number 25. |
Я опять утрирую - площадь опоры такого треугольного человечка минимальна и нависающий над ней центр масс может опрокинуться от малейшего случайного возмущения.
А сейчас рассмотрим самый устойчивый (с физической точки зрения) стиль двуногой ходьбы – «Походку моряка». О таком стиле ходьбы опять же упоминается у Я.И. Перельмана на странице № 25. |
||||||||||||
|
This style, DYNAMICS, of bipedal gait when moving “From point A to point B” is demonstrated by the diagram: |
Данный стиль, ДИНАМИКА, двуногой походки при движении «Из пункта А – в пункт В» демонстрируется диаграммой: |
||||||||||||
|
|
|||||||||||||
|
Diagram # 3. |
|||||||||||||
| Let us ignore the first and last steps shown in this diagram, although they are also interesting. Let us focus on the steps, for which on the diagram a green rectangle is “spread under”. — The center of mass moves sinusoidally. Moreover, with this style of walking, the center of the masses may not even enter the supporting leg, all the time deviating, falling, toward the free leg and slightly forward. We get small oscillations of an inverted (vertical) pendulum. Moreover, the amplitude of these oscillations the vector of gravitation of the center of mass is such that it does not extend beyond the area of the support - the vector of gravitation of the center of mass is always between the soles. The physical principles of the perpendicular stability of this type of vertical gait are demonstrated by the square person already familiar to us: |
Оставим без внимания первый и последние шаги, показанные на данной диаграмме, хотя они тоже интересны. Сосредоточимся на шагах, для которых на диаграмме «подстелен» зеленый прямоугольник. — Центр масс двигается синусоидально. Причём при таком стиле ходьбы центр масс может даже не заходить на опорную ногу, всё время отклоняясь, падая, в сторону свободной ноги и немного вперед. У нас получаются небольшие колебания перевернутого (вертикального) маятника. Причём амплитуда этих колебаний такова, что вектор тяжести центра масс не выходит за площадь опоры – вектор тяжести центра масс всё время между ступнями. Физические принципы перпендикулярной устойчивости данного типа вертикальной походки демонстрирует уже знакомый нам квадратный человечек: |
||||||||||||
|
|
|||||||||||||
| – in this case, the vector of gravitation, conducted from the center of mass, does not go beyond the critical limits - here the tendency prevails of fall on the free leg. This fall will be stopped at the next instant by a free foot set at the desired point, but when she becomes a supporting, then the vector of gravitation of the center of mass will begin to shift towards the other foot, which by that time will become free...
With this style of gait for external random perturbations will more
difficult to made fall of a "cubic man" - you can compare the images
of the "cubic's man" for the first style of gait and for the third.
From the point of view of physics, this style of vertical gait is
most stable.
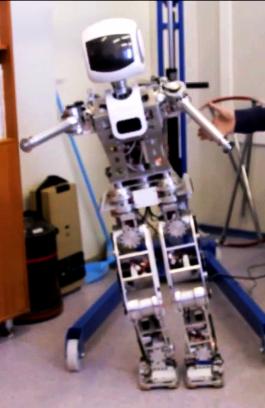
Of course, exactly the comprehension of this physics allowed some
developers to create the most stable upright two-legged
robots: |
– в этом случае вектор силы тяжести, проведенный от центра масс, не выходит за критические пределы – здесь превалирует тенденция падения в сторону свободной ноги. Это падение будет в следующее мгновение остановлено свободной ногой, поставленной в нужную точку, а когда она станет опорной, то вектор тяжести центра масс станет смещаться уже в сторону другой ноги, которая к тому времени станет свободной…
При таком стиле походки внешним случайным возмущениям уронить квадратного человечка будет трудней - сравните фигуры квадратного человечка для первого стиля походки и для третьего.
С точки зрения физики такой стиль вертикальной походки наиболее устойчив.
Безусловно, именно учёт данной физики позволил некоторым исследователям создать наиболее устойчивых прямоходящих двуногих роботов: |
||||||||||||
|
|
|||||||||||||
|
|
|||||||||||||
|
Of course, specialists of Boston Dynamics and other scientific organizations, that have succeeded in this field, do not spread this “secret of sustainability”, but it is obvious that they use it.
Probably, now, after the publication of the “secret of sustainability”, many upright erect two-legged robots may appear simultaneously in different countries.
In this essay, I have shown the GENERAL PHYSICAL theory of the stability of a bipedal gait without taking into account other important features. It makes no sense to develop a detailed theory, because it will be separate for each robot depending on its design - kinematics, dynamic characteristics and other properties. |
Специалисты Boston Dynamics и других научных организаций, преуспевших на этом поприще, об этом «секрете устойчивости», конечно, не распространяются, но очевидно, что они его используют.
Вероятно, теперь, после публикации «секрета устойчивости», в разных странах одновременно могут появиться много прямоходящих двуногих роботов.
В этом эссе мной показана ОБЩАЯ ФИЗИЧЕСКАЯ теория устойчивости двуногой ходьбы без учета других важных особенностей. Нет смысла разрабатывать подробную теорию, т.к. она будет отдельной для каждого робота в зависимости от его конструкции - кинематики, динамических характеристик и других свойств.
|
||||||||||||
|
It is also important to take into account the reactive effects - waving your arms for additional balance when walking. But this is more important when balancing on a tightrope: |
Также важен учёт реактивных эффектов - размахивание руками для дополнительного сохранения равновесия при ходьбе. Но это больше важно уже при балансировании на канате: |
||||||||||||
|
|
|||||||||||||
|
|
|
||||||||||||