


|
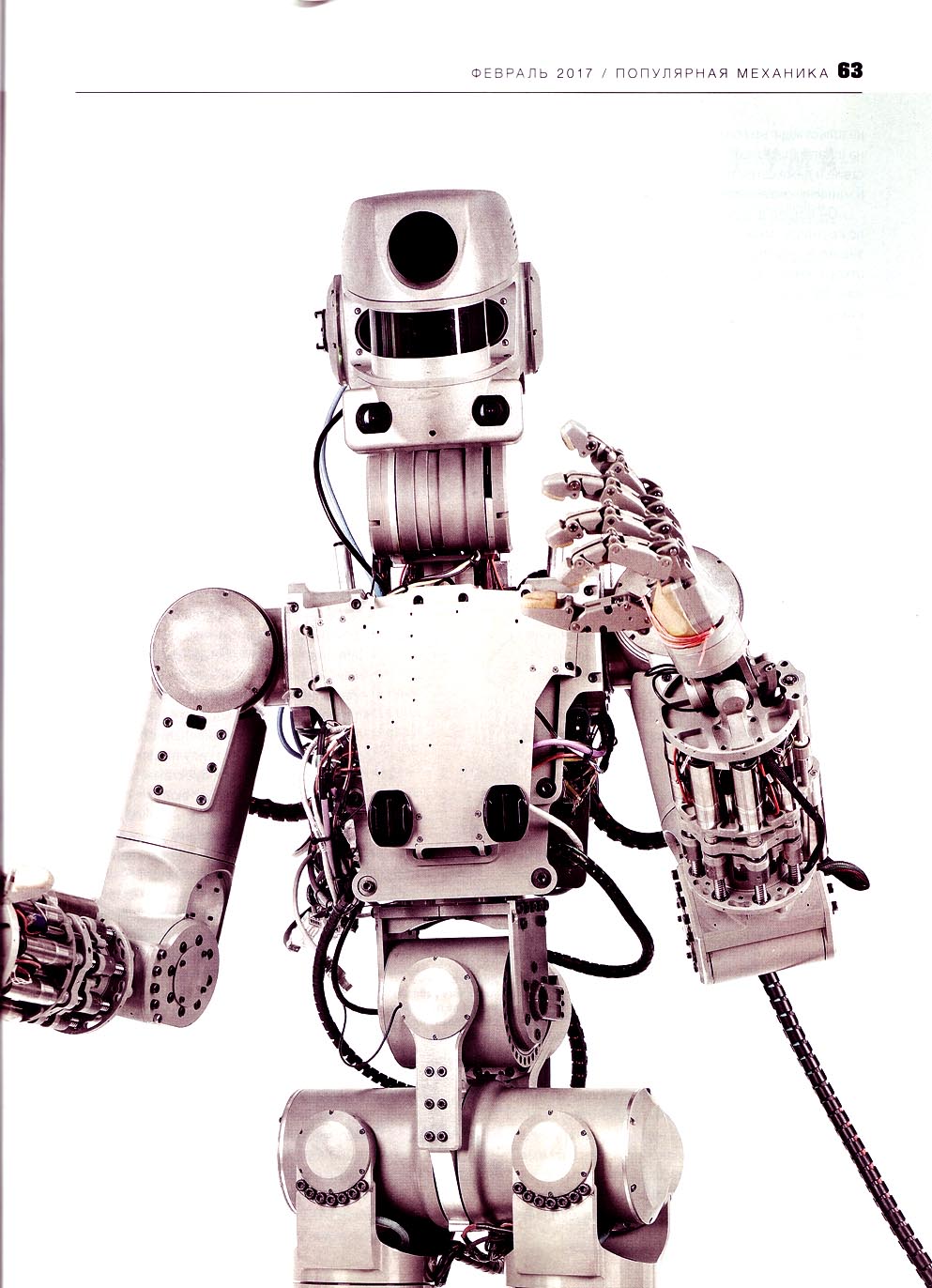
On the given image the person-operator operating by a Russian anthropomorphous robot avatar called "FEDOR", is dressed in full exoskeleton (the legs of the person-operator are put in operating trousers). I.e., possibly, robot-avatars FEDOR will repeat to some extent not only movement of hands of the person-operator, but also movement of legs. By virtue of these circumstances the manufacturers of robot FEDOR should use the support mechanism - differently they will not manage to localize in space of the person-operator - at walking the robot the person-operator will be compelled to repeat a trajectory of the pedestrian walk of the robot. Thus if the robot avatar will operate from any small lodgement (from the protected bunker) then without the support mechanism the person-operator sooner or later will collide with a wall of bunker. - This question was discussed on a Web site: http://streltsovaleks.narod.ru There are also and other reasons explaining why at remote control in the copying mode by the robot-avatar the support mechanism is necessary. But I here already not want to argue any more about this theme - to me already simple laziness to do it. |
На данном изображении человек-оператор, управляющий российским антропоморфным роботом-аватаром FEDOR, одет в полный экзоскелет (на ноги человека-оператора надеты управляющие штаны). Т.е., вероятно, робот-аватар FEDOR в той или иной степени будет повторять не только движение рук человека-оператора, но и движение ног. В силу этих обстоятельств изготовителям робота FEDOR придется использовать механизм подвеса - иначе им не удастся локализовать в пространстве человека-оператора - при ходьбе робота человек-оператор будет вынужден повторять траекторию пешей прогулки робота. При этом если роботом-аватаром будут управлять из какого-нибудь тесного помещения (из защищенного бункера), то без механизма подвеса человек-оператор рано или поздно упрётся в стену бункера. - Этот вопрос обсуждался на сайте: http://streltsovaleks.narod.ru Есть и другие причины, объясняющие почему при дистанционном управлении в копирующем режиме роботом-аватаром необходим механизм подвеса. Но я здесь уже на эту тему рассуждать больше не буду - мне просто лень это делать. |