The underwater anthropomorphous robot - avatar, or why the underwater robot must have legs.
Подводный антропоморфный робот – аватар, или зачем подводному роботу ноги.
an anthropomorphic ROBOT-avatar capable of move on two legs
антропоморфного РОБОТА-аватара, способного передвигаться на двух ногах
- In my opinion to create the high-grade robot avatar (with two legs), controlled in copying mode, without the special support mechanism it is not obviously possible. Here this support mechanism:
О необходимости наличия ног у роботов становится понятно из поучений ВЕЛИКОГО МУДРЕЦА - т.е., очевидно, ноги для роботов очень важны.
- На мой взгляд создать полноценного робота-аватара (с двумя ногами), управляемого в копирующем режиме, без специального механизма подвеса не представляется возможным. Вот этот механизм подвеса:
The first underwater robots have appeared in the middle 50-th years of the last century. Almost at once specialists of robotics have started to do courageous applications, that the underwater robots will soon replace people-divers and the profession "diver" at all will cease to exist. This idea about replacement of people-divers by the underwater robots with greater enthusiasm has been picked up by many journalists and science fiction writers. Since then 60 years already be past - for the humans it the whole generation.
Первые подводные роботы появились в середине 50-тых годов прошлого века. Почти сразу же специалисты – робототехники начали делать смелые заявления о том, что подводные роботы скоро заменят людей-водолазов и профессия "водолаз" как таковая перестанет существовать. Эта идея о замене людей-водолазов подводными роботами с большим энтузиазмом была подхвачена многими журналистами и писателями-фантастами. С тех пор минуло уже 60 лет – по человеческим меркам целое поколение.
an era of a robotics
на заре эры робототехники
Let's compare modern underwater robots and robots 50-60-th years.
Сравним современных подводных роботов и роботов 50-60-тых годов.
the underwater robot modern underwater robot:
подводный робот современный подводный робот:
the many modern underwater robots
современные подводные роботы
modern underwater robots robots
современные подводные роботы роботы
The paradox, but it so.
Парадокс, но это так.
the underwater robots robots the man-diver
подводных роботов, роботов человека-водолаза.
underwater robots absolutely dominate in works in greater depths, but only because on greater depths people-divers cannot make immersion.
подводные роботы абсолютно доминируют при проведении работ на больших глубинах, но только потому, что на большие глубины не могут опуститься люди-водолазы.
But such absolute domination of robots is observed only on greater depths.
Но такое абсолютное доминирование роботов наблюдается только на больших глубинах.
But on the depths accessible to people-divers, the situation cardinally varies – here modern underwater robots concede a palm tree of superiority to people. the robots in present time cannot replace the man-diver in the full measure.
А вот на глубинах, доступных водолазам, ситуация кардинально меняется – здесь современные подводные роботы уступают пальму первенства людям. пока роботы не могут в полной мере заменить человека-водолаза.
overwhelming part of underwater operations on small and average depths, is carried out by people, instead of robots. It and work in ports, both underwater construction, and various rescue and the ship-raising operations.
подавляющая часть подводных операций на малых и средних глубинах, выполняется именно людьми, а не роботами. Это и работа в портах, и подводное строительство, и различные спасательные и судоподъемные операции.
Professionals, which on practice perform underwater works, recognize virtues of robots, but at the same time specialists do mark, that robots yet cannot replace to the full the man-diver, therefore we have to frequently use hard diving suits or use a regime of work with saturation on gas mixes:
Профессионалы, на практике выполняющие подводные работы, признают достоинства роботов, но при этом отмечают, что роботы пока не могут в полной мере заменить человека-водолаза, поэтому зачастую используют жесткие водолазные скафандры или режим работы на газовых смесях с насыщением:
underwater robots hard diving-suits and a pressures chamber for the divers,
подводными роботами жестких водолазных скафандров и барокамер для водолазов,
pressures chamber, a diving-bell and bathyscaphes "Bester" on "Igor Belousov" pressures chamber
барокамерами, подводным колоколом и батискафами "Бестер" на "Игоре Белоусове" барокамеры
underwater robots and hard diving-suits robots cannot replace in the full measure of the anthropomorphous "device", having the legs – of the person-diver, dressed in usual (soft) or in a hard diving-suit.
подводных роботов и жестких водолазных скафандров роботы не могут в полной мере заменить антропоморфное "устройство", наделенное ногами, – человека-водолаза, экипированного в обычный (мягкий) или в жесткий водолазный скафандр.
underwater robots. the underwater robots the underwater robot, made from meccano "Lego" – (how can be it already cheaper?):
подводных роботов. подводных роботов подводный робот, собранный из конструктора "Lego" – (куда уж дешевле?):
an underwater robots, the pilotless machines with remote control, diving-suits:
подводных роботах, телеуправляемых машин водолазных скафандров:
hard diving-suits create the robotized good fingers
жестких водолазных скафандров создают более ловкие роботизированные пальцы:
the remote-controlled underwater devices, traditional diving technologies – recently, in 2014 year, Chinese governmental news agency "Xinhua" has informed, that the Chinese divers have mastered 300 meter depths in a regime of saturation, other countries too will push of the own people-divers in pressures chamber:
подводные телеуправляемые аппараты, традиционные водолазные технологии – недавно, в 2014 году, китайское правительственное информационное агентство "Xinhua" сообщило, что китайские водолазы освоили в режиме насыщения 300 метровые глубины, другие страны тоже пихают в барокамеры людей-водолазов:
In Russia the gatherings, congresses and conferences of divers exist:
В России проходят сборы, съезды и конференции водолазов:
Decrees on diving business are published:
издаются указы по водолазному делу:
The Interdepartmental commission on diving business is created:
создана Межведомственная комиссия по водолазному делу:
or, for example, a direct recognition of developers of modern cubic underwater apparats at international conference MSOI - 2015:
или, например, прямое признание разработчиков современных кубических подводных аппаратов на международной конференции МСОИ - 2015:
testify: the existing underwater robots the man-diver modern underwater robots,
свидетельствуют о том, что существующие подводные роботы человека-водолаза. современных подводных роботов,
In reality, for the full the replace of the people-divers under water, the modern underwater robots should have anthropomorphous structure, and we should control them in a copying regime. I.e. underwater robots should be anthropomorphous robots-avatars with remote control!
На самом деле, чтобы в полной мере заменить под водой людей-водолазов, современные подводные роботы должны иметь антропоморфное строение, и управляться они должны в копирующем режиме. Т.е. подводные роботы должны быть антропоморфными роботами-аватарами с дистанционным управлением!
For underwater robots with a high-quality artificial intellect the humanoid form is not obligatory, but for the robots, operated in the copying mode, she is necessary.
Для подводных роботов с высококачественным искусственным интеллектом антропоморфная форма не обязательна, но для роботов, управляемых в копирующем режиме, она необходима.
The anthropomorphous form of the underwater robot
Антропоморфная форма подводного робота
to management of the robot for performance in serious underwater operations,
Usually it occurs by 12 years of a life, but by this time at the human the impellent skills already strongly are formed - in motor centers for management by just anthropomorphous body are.
допустить к управлению роботом для выполнения серьезных подводных операций,
Обычно это происходит к 12 годам жизни, но к этому времени у человека уже оказываются прочно сформированы двигательные навыки – это двигательные рефлексы по управлению именно антропоморфным телом.
It is necessary to notice also, that the regime of the copying management gives 8 - 10 multiple advantage in speed in comparison with use of regimes of management by means of buttons or joysticks, which be characteristic for cubic robots.
Следует также заметить, что режим копирующего управления даёт 8 - 10 кратный выигрыш в скорости по сравнению с режимом управлением с помощью кнопок или джойстиков, характерного для кубических роботов.
The regime of the copying management of the anthropomorphous robot
Режим копирующего управления антропоморфным роботом
human, operating in a copying mode by the underwater anthropomorphous robot,
человек, управляя в копирующем режиме подводным антропоморфным роботом,
robot will copy this movements - and just therefore we reach in a mode of copying management a high speed.
робот эти движения будет повторять, и именно за счет этого достигается высокая скорость в режиме копирующего управления.
At that time as at use of control in regime by means of buttons or joysticks of similar synchronization and naturalness (subconscious comprehension) we can't reach – the visual control is necessarily necessary in this case.
В то время как при использовании кнопочного или джойстикового режимов управления подобной синхронизации и естественности (подсознательности) достичь невозможно – обязательно нужен визуальный контроль.
Thus, the underwater robots can replace completely under water of people-divers, only if they will the anthropomorphous robots - avatars, and if people will distantly control these robots in the copying regime.
Таким образом, для того чтобы подводные роботы смогли полностью заменить под водой людей-водолазов, следует использовать антропоморфных роботов-аватаров, управляемых в копирующем режиме.
The principle of control by robots in regime of copying is known with 50-th years of the last century.
Копирующий принцип управления роботами известен с 50-тых годов прошлого века.
we can see management in the regime of copying by hands and by heads of the dolls-robots:
мы можем видеть копирующее управление руками и головами кукл-роботов:
we can control remotely in a copying regime by hands and the head of the anthropomorphous robot, then we can control remotely in the same copying regime and by legs of the robot
мы можем в копирующем режиме дистанционно управлять руками и головой антропоморфного робота, то мы сможем в том же копирующем режиме дистанционно управлять и ногами робота
the robot-avatar.
робота-аватара.
solve the problem of securing of steadiness of vertical walking of the anthropomorphous robot-avatar.
решить вопрос обеспечения устойчивости вертикальной ходьбы антропоморфного робота-аватара.
a body of the man-operator operating the robot-avatar, the torso of the anthropomorphous robot-avatar. .
тело человека-оператора, управляющего роботом-аватаром, корпус антропоморфного робота-аватара.
"support mechanism", a support mechanism for remote control of an anthropomorphic walking copying robot-avatar is essential.
Without a support mechanism that appropriately tilts the human operator's body, we will not be able to fully control the walking of the robot-avatar when it moves across an uneven landscape.
Another example of the need to use a support mechanism that gives the body of a human operator the same tilt as the body of an anthropomorphic robot avatar is the transfer of large weight by the robot on the shoulder or back. Let's say we want our an anthropomorphic walking robot-avatar „to do his favorite thing" - to carry large weights on his shoulder.
"механизма подвеса", механизм подвеса для дистанционного управления антропоморфным шагающим копирующим роботом-аватаром необходим обязательно.
Без механизма подвеса, осуществляющего соответствующим образом наклоны тела человека-оператора, нам не удастся полноценно управлять ходьбой робота-аватара при его передвижении по неровному ландшафту. Другой пример необходимости использовать механизм подвеса, придающий телу человека-оператора тот же наклон, что и корпуса антропоморфного робота-аватара, — перенос тяжестей роботом на плече или спине. Допустим, мы хотим, чтобы антропоморфный шагающий робот-аватар занялся „своим любимым делом“ – таскал большие тяжести на плече.
the human operator who controls the anthropomorphic walking robot-avatar in copying mode
человек-оператор, управляющий в копирующем режиме антропоморфным шагающим роботом-аватаром.
without a full-fledged support mechanism that sets the same tilt for a person as that of the robot body, the human operator will not be able to control the robot avatar. - Without a full-fledged support mechanism, a human operator cannot determine the correct amount of inclination of his body! Therefore, without a support mechanism, a person is unstable - without support, he will either fall to the side opposite to the load, or, trying to maintain his balance, he will drop an anthropomorphic walking robot-avatar towards the load. The person-operator, reflexively keeping the OWN balance, will do fall of the robot.
Practice confirms these theoretical meditations:
без полноценного механизма подвеса, задающего тот же наклон человеку, что и у корпуса робота, человеку-оператору управлять роботом-аватаром не удастся. - Без полноценного механизма подвеса человек-оператор не может определить правильную величину наклона своего тела! Поэтому без механизма подвеса человек неустойчив – он без поддержки будет либо падать в сторону противоположную грузу, либо, пытаясь сохранить своё равновесие, будет ронять антропоморфного шагающего робота-аватара в сторону груза. Рефлекторно сохраняя СВОЁ равновесие, человек-оператор уронит робота.
Практика подтверждает эти теоретические размышления:
However, even in virtual space without support mechanism the person by the own bodies of balance can not feel, that a virtual avatar is unstable and how he unstable:
Однако, даже в виртуальном пространстве без механизма подвеса человек своими органами равновесия не может почувствовать, что виртуальный аватар неустойчив и как он неустойчив:
Or another example: a photo from the „Oculus“ company shows how, according to the idea of its marketers, we can immerse ourselves in the virtual universe, being in our apartment. However, getting excited and jumping around the room with our eyes closed, we can injure ourselves (smash your head against furniture or walls - hit your temple on a sharp corner, break your neck or legs, ...):
Или другой пример: фотография от компании „Oculus“ показывает, как по задумке её маркетологов мы можем погрузиться в виртуальную вселенную, находясь у себя в квартире. Однако войдя в азарт и прыгая по комнате с закрытыми глазами мы можем покалечиться (разбить голову о мебель или стены - удариться виском об острый угол, сломать шею или ноги, …):
The inference: to make a managing by a robot the support mechanism of a body of the person-operator is necessary. — The idea is as follows: a human-operator in virtual space should have maximum freedom of different movements (walks) and at the same time in real space, a human-operator should be safely limited (localized) in his spatial movements.
Вывод: необходим механизм подвеса тела человека-оператора, управляющего роботом. — Идея состоит в следующем: человек-оператор в виртуальном пространстве должен иметь максимальную свободу движений (перемещений) и в тоже время в реальном пространстве человек-оператор должен быть безопасно ограничен (локализован) в своих пространственных перемещениях.
simulators with gimbal, with gyroscopic joint,
тренажеры с карданным, гироскопическим, подвесом
robots.
Для управления роботами эти тренажёры не годились.
To create the anthropomorphous robot-avatar, operated distantly in a copying regime, it was necessary to develop the special mathematical theory and special nonsingular support mechanism:
Чтобы создать антропоморфного управляемого дистанционно в копирующем режиме робота-аватара необходимо было разработать специальную математическую теорию и специальный бессингулярный механизм подвеса:
Such mathematical theory and appropriate the nonsingular support mechanism have been developed in 90-th years of the last century - the patent for invention # 2134193 ru.
Такая математическая теория и соответствующий бессингулярный механизм подвеса были разработаны в 90-тых годах прошлого века – патент на изобретение № 2134193 ru.
mankind was been able be creating the anthropomorphous robot - avatar, operated distantly in a copying regime, in the end of the last century,
антропоморфного робота - аватара, управляемого дистанционно в копирующем режиме, можно было изготовить в конце прошлого века,
What gives to us the using of the anthropomorphous robots-avatars in underwater works?
Что даёт применение антропоморфных роботов-аватаров в подводных работах?
1.
It full refusal from use of hard diving-suits – they will simply go to history (resign).
1.
Полный отказ от использования жестких водолазных скафандров – они просто уйдут в историю.
2.
It refusal from the further attempts of the increase of depth of the traditional diving immersings in regime of work with saturation – i.e. will disappear necessity to build greater pressures chamber.
2.
Отказ от дальнейших попыток увеличить глубину водолазных погружений в режиме работы с насыщением – отпадёт необходимость строить большие барокамеры.
3.
Will occur serious changes in the market of traditional cubic underwater robots – the some firms will be compelled to reduce their manufacture.
3.
Произойдут серьёзные подвижки на рынке кубических подводных роботов – некоторые фирмы будут вынуждены сократить их производство.
The hard diving-suits have a several defects
Жесткие водолазные скафандры имеют ряд недостатков,
The anthropomorphous robot-avatars underwater robots, the robot-avatar will be capable to plunge on greater depths, distantly control by the robot-avatar, a head at the robot-avatar and accordingly the hydrolocator, fixed on head of robot, will have an opportunity to turn in the different sides - thither, where it is necessary to the man-operator.
антропоморфный робот-аватар. Как и многие подводные роботы, он будет способен погружаться на большие глубины, человек-оператор, дистанционно управляющий роботом-аватаром, не будет подвергаться никакому риску, голова у робота-аватара и соответственно закрепленный на ней гидролокатор будут иметь возможность поворачиваться в разные стороны.
Hands-manipulators at the robot-avatar the exoskeleton the robot - exoskeleton lift up many times a heavy cargo:
Руки-манипуляторы у робота-аватара экзоскелета робот-экзосклет поднимает много раз тяжелый груз:
robot-exoskeleton the robot-avatars can be allocated by more powerful, in comparison with the man, limbs (by the hands and legs). the robot-avatar with more powerful limbs the "robot-avatars"):
робот-экзоскелет может иметь в 20 раз большую мощность конечностей, то и робот-аватар может быть наделен более мощными, по сравнению с человеком, конечностями. робота-аватара с более мощными конечностями, "робот-аватар"):
the brainless the anthropomorphous robots-avatars operated, only in the copying regime, at mass production will cost much more cheaply by comparison with the hard diving-suits. the own anthropomorphous robot:
безмозглые антропоморфные роботы-аватары, управляемые в копирующем режиме, при массовом производстве будут стоить гораздо дешевле жестких водолазных скафандров.
to build the anthropomorphous robot, anthropomorphous robots-avatars,
To provide waterproofness of the robot-avatar already will not by the big problem (I again shall refer here to the my invention):
Обеспечить же герметичность робота-аватара не составит большого труда (здесь я снова сошлюсь на своё изобретение):
diving technologies with unlimited depth of immersing.
водолазных технологий с неограниченной глубиной погружения.
Поэтому я полагаю, что если полупроводниковые кристаллы в условиях повышенного давления сохраняют энергетические зоны, обеспечивающие работу "p-n переходов", то можно предложить меры, которые позволят электронике сохранять работоспособность и на больших глубинах. И я уже знаю эти меры, только это будет уже немного другая электроника.
Management by the underwater anthropomorphous robot-avatar can be carried out by means of a cable from the ship or from a submarine,
Управление подводным антропоморфным роботом-аватаром можно осуществлять по кабелю с корабля или с подводной лодки,
to create the high-grade anthropomorphous robot-avatar in full-size.
создать полноценного полноразмерного антропоморфного робота-аватара.
Thus, the hard diving-suits lose on all positions compared to the anthropomorphous robots-avatars. Therefore hard diving-suits will go to history (resign).
Таким образом, жесткие водолазные скафандры проигрывают по всем позициям антропоморфным роботам-аватарам. Поэтому жесткие водолазные скафандры уйдут в историю.
the work of the man-diver in conditions of greater pressure is fraught with serious medical and biologic problems (the nervous syndrome of high pressures; the joints of limbs, of hands and legs, gets jammed; mental abilities worsen; curdling of blood - as a consequence: probable the risk of thrombus; caisson disease, weight loss - anorexia, ...) and, possibly, what we already will not can reach more the substantial increase of depth at use of pressures chamber – "the game is not worth the candle". Now, much time later, participants of secret experiment already gradually start to tell the truth about the researches, which was spent in the USSR by military experts in the end of 80-th years last century. It were the simulation immersings of the divers on depth of 500 meters. But then was need to interrupt these researches ahead of time by from reasons of the medical indications, because for participants of researches there was a real threat of a life. Certainly, the authorities awarded all participants of the experiment with orders for courage. But after all, the experiment failed - because it had to stop prematurely. Here the sources of information about this experiment:
работа человека-водолаза под большим давлением чревата серьезными медико-биологическими проблемами (нервный синдром высоких давлений; заклинивает суставы; ухудшаются интеллектуальные способности; загущение крови - как следствие: опасность возникновения тромбов; кессонная болезнь, потеря веса - анорексия, ...) и, вероятно, сколь-нибудь существенного увеличения глубины при использовании барокамер достичь уже не удастся – "игра не стоит свеч". Сейчас, спустя много времени, участники секретного эксперимента уже понемногу начинают рассказывать правду, об исследованиях, проводившихся в СССР военными специалистами в конце 80-тых годов прошлого века. Это были имитационные погружения водолазов на глубину 500 метров. Опыты пришлось прервать раньше времени по медицинским показаниям, т.к. для участников исследований возникла реальная угроза жизни. Конечно, начальство наградило всех участников эксперимента орденами за мужество. Но ведь эксперимент "провалился" - раз его пришлось прервать раньше времени. Вот источники информации об этом эксперименте:
Or here one more pathos film about last records of the Russian divers where it is told about difficulties at immersions with saturation. Overcoming of these difficulties on an idea of authors of film should emphasize heroism of situation:
Или вот ещё один пафосный фильм о последних рекордах российских водолазов, где рассказывается о трудностях погружений с насыщением. Преодоление этих трудностей по замыслу авторов фильма, вероятно, должно подчеркнуть героизм события:
But because of difficulties it has turned out by a similarly to principle: "Mice sobbed, cried, were pricked, but… continued to eat a cactus" or "We yourself create difficulties and later we is overcome them" - if all it so difficultly, then we obviously need in use of other methods for underwater works in greater depths. The fact - a method of immersing with saturation have a very low a coefficient of efficiency - only two persons can work within one hour on a ground of sea, but then tens of men be errand-boys around them within 23 day.
Но именно из-за трудностей получилось по принципу: "Мыши пищали, плакали, кололись, но… продолжали есть кактус" или "Сами создаем трудности - сами потом их и преодолеваем" - если всё так сложно, то может быть стоит использовать другие способы проведения подводных работ на больших глубинах? Ведь у способа погружений с насыщением очень низкий КПД - на морском грунте в течение часа работали только два человека, а вокруг них в течение 23 суток "бегают" десятки людей.
Besides, the work of the man-diver always was very dangerous profession, and the statistics here testifies about a plenty of accidents:
Кроме того, работа человека-водолаза всегда была очень опасной профессией, статистика здесь свидетельствует о большом количестве несчастных случаев:
Therefore the distantly controlled anthropomorphous robots-avatars substantially will substitute on labour-market of diving technologies, where by tradition the people-divers used gas mixes. Will disappear the need to build big the pressures chambers.
Поэтому управляемые дистанционно антропоморфные роботы-аватары в значительной степени потеснят людей-водолазов, работающих на газовых смесях. Отпадёт потребность строить барокамеры.
make control of underwater robots-avatars. If formerly people-divers submerged in water, subjecting to risk of the own life and health, then now they will simply dressed in new costume of management of the robot, „et voila” – they again in a diving business, only without any accompanying negative problems for own health.
управлять подводными роботами-аватарами. Если раньше люди-водолазы лезли под воду, подвергая свою жизнь и здоровье риску, то теперь они просто наденут новый костюмчик управления роботом, „и вуаля” – они снова в водолазном деле, только без каких-либо сопутствующих негативных для здоровья проблем.
the occurrence in much as possible convenient in management the underwater anthropomorphous robots-avatars substantially will make cubic production irrelevant to time. robots, robots
underwater robots
Will agree: if for us the BIG powerful underwater tractor is necessary for industrial extraction of ferromanganese nodules, the BIG dredge or the BIG combine-mechanism, then is no of a sense them to do anthropomorphous - they can be cubic:
появление максимально удобных в управлении подводных антропоморфных роботов-аватаров в значительной степени сделает кубическую продукцию неактуальной. роботов, роботах
подводные роботы
Согласитесь: если нам необходим БОЛЬШОЙ мощный подводный трактор для промышленной добычи железо-марганцевых конкреций, БОЛЬШОЙ экскаватор или БОЛЬШОЙ комбайн, то нет смысла их делать антропоморфными - они могут быть кубическими:
underwater robots the underwater robots the "underwater robot-avatar". ("Robot - AVATAR" – exactly so the authors of the project and write, in general this word "avatar" now became very popular).
подводные роботы подводным роботам "подводного робота-аватара". ("Аватар" – именно так и пишут авторы проекта, вообще это слово "аватар" сейчас стало очень популярным).
such robot not to the full anthropomorphous – he is legless, therefore he cannot replace completely the man-diver in work under water.
такой робот не в полной мере антропоморфный – у него нет ног, поэтому он не может полностью заменить человека - водолаза при работе под водой.
talk in more detail about the anthropomorphous robot-avatar.
поговорить об антропоморфном роботе-аватаре.
by the operated distantly robots-avatars:
управляемыми дистанционно роботами-аватарами:
It and British robot "RoboТhespian":
Это и британский робот "RoboТhespian":
and German robot "Justin":
и немецкий робот "Justin":
and American "Robonaut" and robot Sally:
и американские "Robonaut" и робот Sally:
and Japanese robot "Telesar - 5":
и японский робот "Telesar - 5":
And the Korean robot also gesticulates by hands:
Размахивает руками и корейский робот:
The private inventors „sculpt“ of exoskeletons for controlling the hands of anthropomorphic robots from the „Lego“ constructor and from the different rubbish:
Частные изобретатели „лепят“ экзоскелеты для управления руками антропоморфных роботов из конструктора „Lego“ и всякого мусора:
I.e. worldwide numerous attempts are undertaken to create of the anthropomorphous robot-avatar.
Т.е. по всему миру предпринимаются многочисленные попытки создать антропоморфного робота-аватара.
But legs are necessarily necessary for the anthropomorphous robot-avatar – presence of two legs, on which he should ideally goes, it be sine qua non.
Но антропоморфному роботу-аватару обязательно необходимы ноги – две ноги, на которых он должен полноценно ходить по сильнопересеченной местности, это непременное условие.
"Our robot necessarily should goes!" – the little whim of the chief, from which begin all topic of film.
"Наш робот обязательно должен ходить!" - небольшой каприз начальства, вокруг которого и закрутился весь сюжет фильма.
Therefore specialists search for the most different methods of management of the robot-avatar.
Поэтому специалисты ищут самые разные способы управления роботом-аватаром.
the robot
the robot-avatar
the robot-avatar.
method for management by the robot-avatar.
робот робота-аватара
каждому желающему порулить роботом-аватаром не удастся. способа управления роботом-аватаром
method of management the movements between the robot-avatar and the man-operator is nonsynchronous limbs of the robot-avatar limbs of the robot-avatar, robot will hold in own manipulators. the angular spatial orientation of the robot body can change unpredictably under the influence of external factors, surrounding the robot.
способе управления движения робота-аватара и человека-оператора несинхронные конечностей робота-аватара конечностей робота-аватара, не может ощущать вес поднимаемых роботом предметов. угловая пространственная ориентация корпуса робота может непредсказуемо меняться под воздействием внешних факторов, окружающих робота.
The robot-avatar can move
Робот-аватар при этом способе управления может двигаться
moving of the robot-avatar on the strong impassable terrains – in this, as a matter of fact, and all sense of giving to the overland robot-avatar bipedalism consists – the overland biped robot-avatars should have a passableness not worse than the healthy man.
обеспечивать возможность хождения робота-аватара по сильно пересеченной местности – в этом, собственно говоря, и состоит весь смысл придания сухопутному роботу-аватару двуногости – сухопутный двуногий робот-аватар должен иметь проходимость не хуже человека.
the robot will control by the robot-avatar
робот управлять роботом-аватаром
to control the robot-avatar the robot
управлять роботом-аватаром робота
the robot
роботом
to do high-grade control by the anthropomorphous biped robot-avatar.
способ позволит полноценно рулить антропоморфным двуногим роботом-аватаром.
a feedback from the robot
обратной связи от робота
method of management by the robot is applicable on Fukushima. So and in the video film, which I show below, the orator made talk about Fukushima. But it not so.
способ управления роботом применим на Фукусиме. Вот и в приведенном ниже видеоролике оратор говорит о Фукусиме. Но это не так.
during management of the robot.
во время управления роботом
for management by the complex anthropomorphous biped orthograde robots-avatars
для управления сложными антропоморфными двуногими прямоходящими роботами-аватарами
a full anthropomorphic robot avatar, such robot, that he can walk on two legs by the difficult terrain. feedback from the robot to the man, patent for invention # 2134193 ru.
антропоморфного робота-аватара, способного перемещаться на двух ногах по труднопроходимой местности. необходимо использовать технологию, описанную в патенте на изобретение № 2134193 ru.
of control by the robotized systems
попытка управления роботизированными системами
feedback of the robotized system people the volunteers, which will want be chauffeur by the robot-avatar for control by the robot - avatar. the man can some time be chauffeur of the robot-avatar. management by a robot avatar the robot-avatar, the robot-avatar
обратной связи роботизированной системы добровольцы, желающие порулить роботом-аватаром с помощью такого способа. управлять роботом-аватаром. человек сможет какое-то время порулить роботом-аватаром. управление роботом - аватаром порулить роботом-аватаром, роботом-аватаром
the robot-avatar
порулить роботом-аватаром
the remote control by the anthropomorphous robot-avatar.
дистанционное управление антропоморфным роботом-аватаром.
the only one method, described in the invention, protected by the patent # 2134193 ru, is acceptable to management by the anthropomorphous robot-avatar.
только способ, описанный в изобретении, защищенном патентом № 2134193 ru, приемлем для управления антропоморфным роботом-аватаром.
to underwater technologies for creation the anthropomorphous robot-diver. maintenance of dynamic vertical stability of the robot.
применить именно к подводным технологиям для создания антропоморфного робота-водолаза. это является дополнительным подспорьем для обеспечения динамической вертикальной устойчивости робота.
to operate and by the overland robots,
удастся управлять и сухопутными роботами,
for the robot-avatar the peace role will be allocated:
роботу-аватару будет отведена мирная роль:
robots-soldiers the robot-soldier, which have control distantly,
the robot-avatar did shooting from a pistol and driving of a quadrocycle before the president of Russia V.V. Putin:
робота-аватара, стреляющего из пистолета, катали на квадрацикле перед президентом России В.В. Путиным:
chosen for control by the robot-avatar of a method, protected by the patent # 2134193 ru – of the other methods of remote control by the robot-avatar at present no exist, how I already showed by means the above-stated analysis. the patent # 2134193 ru.
выбрали для управления роботом-аватаром способ, защищенный патентом № 2134193 ru – других способов дистанционного управления роботом-аватаром, как показывает вышеприведенный анализ, на данный момент нет. патенте № 2134193 ru.
use of technology of the overland anthropomorphous robot-avatar at liquidation of such serious accidents, as catastrophes in Chernobyl or on Fukushima.
применение технологии сухопутного антропоморфного робота-аватара при ликвидации таких серьезных техногенных аварий, как катастрофы в Чернобыле или на Фукусиме.
this exoskeleton not have enough elevating force to bear so thick (massive) protection against radiation, in inside in exoskeleton, at all be not exposed to an atomic irradiation.
more powerful exoskeleton,
Подъёмной силы у этого экзоскелета явно недостаточно, чтобы нести настолько толстую (массивную) защиту от радиации, что бы человек, который находится внутри экзоскелета, совсем не подвергался радиационному облучению.
более мощный экзоскелет,
massive exoskeleton,
массивный экзоскелет,
the exoskeleton
экзоскелет
exoskeletons, exoskeleton exoskeleton
экзоскелете экзоскелеты.
then therefore is asked - wherefore to risk a life and health of man, if all this work in a zone of high radiation can be made absolutely safely by means of the inexpensive and as much as possible convenient in management of anthropomorphous robots of my design?
зачем рисковать жизнью и здоровьем людей, если всю эту работу в зоне высокой радиации можно абсолютно безопасно сделать с помощью недорогих и максимально удобных в управлении дистанционных антропоморфных роботов-аватаров?
"Asahi" Therefore without the robots of my design, which as much as possible convenient in management, the liquidation of wreck in Fukushima for Japan will cost very expensively.
"Asahi"Поэтому без антропоморфных роботов-аватаров, максимально удобных в дистанционном управлении, ликвидация аварии в Фукусиме обойдется Японии очень дорого.
independent robots with an artificial intellect (radiation spoils gentle electronics of brains of robots and completely independent robots can "go mad", crush all around of itself and hence to aggravate a situation).
автономные роботы с искусственным интеллектом (радиация портит нежную электронику мозгов роботов и полностью автономные роботы могут "сойти с ума", разгромить всё вокруг себя и тем самым усугубить ситуацию).
the robot
роботом
the robots with an artificial intellect the robot in electronic brains of robots robots with an artificial intellect
роботы с искусственным интеллектом у роботов в электронных мозгах автономных роботов с искусственным интеллектом
the robot will be more reliable, if the electronic stuffing of the robot will be more simple. if the electronic stuffing of the robot will more simple, then the robot will be cheaper and in case of its breakage we can cheaply replace him by new robot.
Therefore on Fukushima first of all it is necessary to use robots with remote control. Besides, completely independent robots with an artificial intellect are still insufficiently clever and by virtue of it their use in non-standard conditions of industrial wreck is very limited – they cannot accept adequate creative decisions.
чем проще будет электронная начинка робота, тем он будет надежней. чем проще электронная начинка робота, тем робот будет дешевле, а в случае его поломки его будет дешевле заменить новым. Поэтому на Фукусиме прежде всего следует использовать роботов с дистанционным управлением. К тому же полностью автономные роботы с искусственным интеллектом ещё недостаточно умны, и в силу этого их применение в нестандартных условиях промышленной аварии весьма ограничено – они не могут принимать адекватных творческих решений.
How an example of such inadequate behavior of the robot I can show on a case with a robot ASIMO. Press image - Web hyperlink:
В качестве примера такого неадекватного поведения робота можно привести случай с роботом АСИМО (см. ссылку):
the use on Fukushima of the anthropomorphous robots-avatars, which man can control distantly.
применение на Фукусиме управляемых дистанционно антропоморфных роботов-аватаров.
anthropomorphous robots
антропоморфными роботами
easily, cheaply and quickly to adapt similar brainless anthropomorphous robots for the all complex works in Fukushima. The anthropomorphous robots it already are not simple, primitive robots-snakes, The anthropomorphous robots with remote control will can do all same work, which may is done just by the human, dressed in a protective costume.
легко, дешево и быстро приспособить подобных безмозглых антропоморфных роботов для выполнения всех сложных работ на Фукусиме. Антропоморфные роботы – это не простые, примитивные роботы-змеи, Антропоморфные роботы с дистанционным управлением смогут делать всю ту же самую работу, которую может сделать только человек, одетый в защитный костюм.
"Robotics Challenge".
the robot-rescuer. the independent robots-soldiers with an artificial intellect, robots-rescuers.
Сейчас в США периодически проходят международные соревнования роботов: "Robotics Challenge".
роботом-спасателем автономных роботов-солдат с искусственным интеллектом, роботами-спасателями.
the elements of an artificial intellect do not love radiation.
элементы искусственного интеллекта не любят радиации.
the robots,
роботы
I.e., obviously, that the robots participating in competitions "Robotics Challenge", so far not for Fukushima – on Fukushima the "drunken" robots, with a unreliable artificial intellect, are unnecessary.
Т.е., очевидно, что роботы, участвующие в соревнованиях "Robotics Challenge", не для Фукусимы – на Фукусиме не нужны "пьяные" роботы с ненадежным искусственным интеллектом.
In reality the all robots, participating in competitions "Robotics Challenge", in a varying degree is the distantly operated machines. The elements of AI "are necessary" to these robots, according to applications of organizers of competitions (of the American militarists), ostensibly in order the robots could continue work and in that case, if communication will by chance be gone.
В действительности все роботы, участвующие в соревнованиях "Robotics Challenge" – в той или иной степени – дистанционно управляемые машины, а элементы ИИ им "нужны", по заявлениям организаторов соревнований (американских военных), якобы для того, чтобы робот мог продолжать работу в случае, если связь случайно пропадёт.
By the way, if it is presumed, that the robots participating in competitions, will be used in the peace purposes in zones with emergency situation (so the American militarists - organizers of these competitions declare), then it would be logical, what in case of loss of communication the robots simply would cease to make any movements and have simply stood absolutely motionlessly, till the moment of restoration of communication.
Кстати, если предполагается, что роботы, участвующие в соревнованиях, будут использоваться именно в мирных целях в зонах ЧС (так заявляют американские военные - организаторы этих соревнований), то было бы логично, что в случае потери связи роботы просто перестали бы совершать какие-либо движения и просто замерли абсолютно неподвижно, до момента восстановления связи.
In fact is presumed, that the emergency situation has occurred in a peace time, and SPECIALLY (intentionally) nobody will break communication in zone the emergency situation – it not a zone of military actions. I.e. actually to heads of liquidation of the emergency situation will be more correct, first of all, to take care of maintenance of steady communication in a zone of the emergency situation, than to invent of complex robots with AI.
Ведь предполагается, что ЧС произошло в мирное время, и никто СПЕЦИАЛЬНО (преднамеренно) нарушать связь в зоне ЧС не будет – это же не зона военных действий. Т.е. на самом деле руководителям ликвидации ЧС правильнее будет, прежде всего, позаботиться об обеспечении устойчивой связи в зоне ЧС, чем изобретать сложных роботов с ИИ.
In the videoclip, which I showed here (the drawing # 52), one of robots tries to open a fire hydrant and in this moment a radio communication with him, most likely, vanishes. As a result the robot, obeying the program, "opens a fire hydrant" - brandish hands-manipulators in air, and, having lost stability, he falls.
В приведенном здесь видеоролике (рисунок № 52) один из роботов пытается открыть пожарный кран и в этот момент радиосвязь с ним, по всей видимости, пропадает. В результате робот, повинуясь программе, "открывает пожарный кран" размахивая руками-манипуляторами в воздухе, и, потеряв устойчивость, падает.
But imagine, that something similar occurs somewhere in control center of a nuclear reactor and instead of muffling a nuclear reactor, the robot, obeying own programs, will start to press not those buttons or will fall on a control panel. No, let already the robot be stopping motionlessly, in case of loss of communication! – Sometimes inactivity is better, than silly activity.
А представьте, что нечто подобное происходит где-нибудь в пункте управления ядерным реактором, и вместо того чтобы заглушить ядерный реактор, робот, повинуясь собственным программам, начнет нажимать не те кнопки или упадет на пульт управления. Нет уж, пусть уж робот, в случае потери связи, замрет неподвижно! – Иногда бездействие лучше, чем глупая деятельность.
Thus, the rescue operations, also as and surgical operations, it such cases, where generally it is better to not use artificial intellect, than to use a bad artificial intellect.
Таким образом, спасательные операции, также как и хирургические операции, это тот случай, где лучше не использовать никакого искусственного интеллекта, чем использовать плохой искусственный интеллект.
Besides, the problem of creation of an artificial intellect, probably, should be solved not so. – I recently began to revise the own old files with records of my ideas, related to the AI, and to compare these ideas with that information, which now print about a problem of artificial neural networks. As a result I has the interesting conclusion – the specialists, probably, do not understand the work of the biological neural networks! (Or the specialists write not all. – They "clamp" the information.) However here I already shall not develop a theme of an artificial intellect.
К тому же, проблема создания искусственного интеллекта, вероятно, решается не так. – Я недавно стал копаться в своих старых файлах по ИИ и сравнивать эти записи с той информацией, которую сейчас печатают по проблеме нейронных сетей. В результате пришёл к интересному выводу – специалисты не понимают как работают биологические нейронные сети! (Или специалисты не всё пишут – "зажимают" информацию.) Однако здесь я уже не буду развивать тему искусственного интеллекта.
In comparison with the robots, participating in competitions "Robotics Challenge", robots, which work only in regime of the remote control with copying, i.e. the robots without an artificial intellect, show more predicted results. Here video from NPO "Androidnaya technica", possibly, what exactly this company will first ever in world, which can create the anthropomorphous robot-avatar operated distantly in the copying regime:
По сравнению с роботами, участвующими в соревнованиях "Robotics Challenge", роботы, которые работают только в копирующим режиме управления, т.е. роботы без искусственного интеллекта, демонстрируют более предсказуемые результаты. Вот видео от НПО "Андроидная техника", вероятно, что именно эта фирма первая в мире создаст антропоморфного робота-аватара, управляемого дистанционно в копирующем режиме:
the project of the two-legged robot-avatar:
работать над проектом двуногого робота-аватара:
Meanwhile the Russia already have of the high-grade robot - avatar.
режим управления обеспечит устойчивое вертикально передвижение робота - аватара для управления подводным антропоморфным роботом - водолазом. сухопутного применения антропоморфного робота - аватара — на этот счет можно посмотреть первую страницу описания патента на изобретение № 2134193 ru:
Now secret tests of the anthropomorphous overland robot - avatar, which FPR of Russia made, have completely confirmed correctness of my ideas – the method of management, invented by me, is suitable and for overland robots. I, certainly, am very grateful to FPR relatively of these tests, which they made, however in any case it would be desirable to receive money from use of my intellectual property.
Теперь секретные испытания антропоморфного сухопутного робота - аватара, проведенные ФПИ России, полностью подтвердили мою правоту – изобретенный мной способ управления пригоден и для сухопутных роботов. Я, конечно, очень благодарен ФПИ за проведенные испытания, однако хотелось бы всё таки получить деньги за использование моей интеллектуальной собственности.
But we shall return to discussion of catastrophe on Fukushima.
the robot - sonde, he has shown very high level of radiation - 650 sieverts. Later the robot - sonde "has died" due to the of radiation within 2 hours:
Но вернемся к обсуждению аварии на Фукусиме.
робот-зонд, он показал очень высокий уровень радиации - 650 зиверт. После чего робот-зонд "умер" от радиации в течение 2 часов:
the robot - sonde evidently shows, that for liquidation of radiation catastrophe on Fukushima it is necessary to select absolutely other strategy. Already there is no sense to shove robots in emergency reactors.
In reality the robots is necessary to us for other purposes - they should build around of each emergency reactor the protective dome, which will prevent outflow of radiation in an atmosphere. And already under the arches of these protective domes the robots should do montage of the special heavy equipment, which capable to sustain high levels of radiation and allowing to do a dismantle TOP-DOWN of a reactors.
Of course, the opponents can object to me, that the existing special heavy equipment has been adjusted for small set of manipulations with of the same kind of fuel shanks, but in case of Fukushima we have the alloyed chaotically located fuel. Yes, however it only means, that the heavy equipment should be modernized in view of the arisen circumstances, probably, we need establish there mechanical dredge for capture of separate fragments, plus need to use of a hydroabrasive cutter for decomposition to the acceptable sizes of structures of a reactor and the fused nuclear fuel. The mirror allow to conduct visual supervision over of work of the clamshell dredge from the big distance from behind corner. It will better if mirrors will be made with a gold covering - this covering will be more stable than silver or aluminum and through a this equipment necessary expulsion of a gas to exclude penetration in inside of the radioactive dust, which will born at time of dismantling of a reactor. Light beams are reflected from a mirror and go to a camcorder, but radioactive irradiations in a mirror are not reflected and they do not change the direction, therefore aside camcorders will not extend. If we will do taking into consideration of that fact, what in reactors of Fukushima the chain reactions of division of the atomic nucleuses are stopped, i.e. already there is no big stream of neutrons, then such simple protection against an alpha, beta and gamma of particleswill allow videocameras to function much longer and will make transferred images better. While images received now with the poorly protected videocameras directly shipped in reactors, have many hindrances, caused by impacts of particles on pixels of a matrix of videocameras.
Images of the clamshell dredges and a mirror telescope (the videocamera, protected from radiation) are presented below:
роботом - зондом наглядно показывает, что для ликвидации радиационной аварии на Фукусиме следует избрать принципиально иную стратегию. Уже нет смысла пихать роботов в аварийные реакторы.
На самом деле роботов нужно использовать для других целей - чтобы соорудить вокруг каждого аварийного реактора защитный купол, предотвращающий утечку радиации в атмосферу. И уже под сводами этих защитных куполов смонтировать специальное тяжёлое оборудование, способное выдерживать высокие уровни радиации и позволяющее осуществить СВЕРХУдемонтаж реакторов.
Оппоненты могут мне возразить, что существующее специальное тяжелое оборудование было рассчитано для выполнения ограниченного набора манипуляций с однотипными топливными стержнями, а в случае Фукусимы мы имеем сплавленное хаотично расположенное топливо. Да, но это только означает, что тяжелое оборудование придется модернизировать с учётом возникших обстоятельств, возможно, установить на него механический грейфер для захвата отдельных фрагментов, плюс использовать гидроабразивный резак для измельчения до приемлемых размеров конструкций реактора и расплавленного ядерного топлива. Вести визуальное наблюдение за работой грейфера можно с большого расстояния из-за угла с помощью зеркал. Зеркала лучше сделать с золотым покрытием - оно будет более стойким, чем серебряное или алюминиевое и через это устройство необходимо продувать газ, чтобы исключить попадание внутрь радиоактивной пыли, возникающей в процессе демонтажа реактора. Световые лучи отражаются от зеркала и направляются в сторону видеокамеры, а радиоактивные излучения в зеркале не отражаются и не меняют своего направления, поэтому в сторону камеры распространяться не будут.Учитывая тот факт, что в реакторах Фукусимы цепные реакции деления атомных ядер остановлены, т.е. уже нет большого потока нейтронов, такая простая защита от альфа, бета и гамма частицпозволит видеокамерам функционировать гораздо дольше и сделает передаваемые изображения более качественными. В то время, как изображения полученным сейчас с помощью плохозащищенных видеокамер, непосредственно погруженных в реакторы, имеют очень много помех, вызванных ударами частиц в пикселы матриц видеокамер.
Изображения грейферов-драг и зеркального телескопа (защищенной от радиации видеокамеры) представлены ниже:
Importantly, what such special heavy equipment will be capable resists against of a high levels of radiation during long time, unlike the skinny robots, which now are pushed through in a pipe.
And this unique solution of a problem - all other methods of solution of this task simply is impossible, because practice shows that neither people and neither a weakly protected robots in a reactor cannot work.
Thus robots will be necessary for a construction of external protective domes around of reactors. - The affair so, that in a result of failure a radiating background near reactors is raised and people (even in protective suits) cannot be near with reactors. At the same time this radiating background, observed near reactors, for robots is fully admissible. We can approximately estimate how robots be more stable to radiation in comparison with people. The size of a radio-activity in 20 Siverts causes "instant" death of man (the person very quickly loses consciousness, and then dies). To me is complex to tell, that here imply under a word "instantly", how long this time interval, let we shall admit, that it - 10 seconds - time during which the person will lose consciousness. Now we shall recollect that robots within 2 hours had functioned in an emergency reactor at radiation 530 Sv/hr. Thus, we after corresponding calculations can receive conclusion that the robots endure radiation 19080 times more steadfastly in comparison with people. Further, if to recollect already shown above Sergey Mingazhev's videoreporting, where he speak, that directly close to emergency reactors the radioactive background makes approximately 400 microSv, and there a people can work only a few hours without essential harm for health, then in the consent with the mathematical calculations executed by us it turns out, that robots can work in the same workplace about half a year "without essential harm for their iron health". Therefore just robots and should construct around reactors protective domes.
Besides during of the dismantle of a reactors, perhaps, will the need periodically transiently send the robots for a service of the specialized heavy equipment - of the dredge and a videocamera-telescope. And exactly robots should do it - about sending people in a reactor with a radiating background 530 - 650 Sv/hr or inside a protective dome in process of dismantling of a reactor even there is no sense and to speak. And at the same time it is undesirable to send robots directly to a reactor, there, where fuel and the big level of radiation is concentrated - under a protective dome it is possible to create some zones-rooms. In one such zone-room there will be an emergency reactor and only the specialized heavy equipment will be engaged in its disassembly. And already in other zone with a smaller level of radiation, if necessary, the robots will do service of the heavy equipment, there they can exchange quickly mirrors or videocameras . Due to it the saving of robots will be reached.
Later, after extraction of fuel and a dismantle of a reactor, it will be necessary to dismantle already heavy equipment, and then in final also walls of a protective dome. And, certainly, just robots can do all it.
Therefore the robots are required. But it already should be not primitive ineffective serpentine or "scorpion-shaped" robots, which only and can what to look and measure radiation (the such armless robots in fact do not carry out any other serious work). It should be as much as possible convenient in remote control the anthropomorphous robots-avatars, the robots, which have two hands and two legs.
In other reporting of Sergey Mingazhev the general director of the atomic power station "Fukushima - 1" Akira Ono exactly speaks about necessity of creation of a robots, which will more convenient in management:
Важно то, что такое специальное тяжелое оборудование будет способно длительное время выдерживать высокие уровни радиации, в отличие от тощих роботов, пропихиваемых в трубу.
И это единственно возможное решение проблемы, по другому решить эту задачу просто не получается – как показывает практика ни люди, ни слабо защищенные роботы, в реакторе работать не могут.
Таким образом роботы будут нужны для сооружения внешних защитных куполов вокруг реакторов. – Дело в том, что в результате аварии радиационный фон возле реакторов повышен и люди (даже в защитных костюмах) там не могут находиться. В тоже время этот радиационный фон, наблюдаемый возле реакторов, для роботов вполне приемлем. — Можно примерно оценить во сколько раз роботы более стойко переносят радиацию по сравнению с людьми. Величина радиоактивности в 20 Зиверт вызывает у человека "мгновенную" смерть (человек очень быстро теряет сознание, а затем умирает). Сложно сказать какой на самом деле промежуток времени здесь подразумевается под словом "мгновенно", допустим, это 10 секунд - время, в течение которого человек потеряет сознание. Теперь вспомним что роботы функционировали в аварийном реакторе при радиации 530 Зиверт в течение 2 часов. После соответствующих вычислений получаем, что роботы в 19080 раз более стойко переносят радиацию по сравнению с людьми. Далее, если вспомнить уже приводившейся выше видеорепортаж Сергея Мингажева, где говорится, что непосредственно вблизи к аварийным реакторам радиоактивный фон составляет примерно 400 мкЗиверт, и люди могут работать там только несколько часов без существенного вреда для здоровья, то в согласии с выполненными нами математическими расчётами получается, что роботы смогут работать на этом же рабочем месте примерно полгода "без существенного вреда для их железного здоровья". Вот и придётся именно роботам сооружать защитные купола вокруг аварийных реакторов.
Кроме того, в процессе демонтажа реакторов роботам, вероятно, придется периодически кратковременно обслуживать специализированное тяжелое оборудование - драгу, и видеокамеру-телескоп. Это должны будут делать роботы - о том, чтобы посылать людей в реактор при радиационном фоне 530 - 650 Зв/ч или под защитный купол в процессе демонтажа реактора даже нет смысла и говорить. При этом нежелательно посылать роботов непосредственно в реактор, туда, где сосредоточено топливо и большой уровень радиации - под защитным куполом можно создать несколько зон-комнат. В одной такой зоне-комнате будет аварийный реактор и его разборкой будет заниматься только специализированное тяжелое оборудование. А обслуживаться тяжелое оборудование будет в другой зоне с меньшим уровнем радиации, где роботы при необходимости смогут быстро поменять зеркала или видеокамеры. За счет этого будет достигаться экономия роботов. Потом, после извлечения топлива и демонтажа корпуса аварийного реактора, необходимо будет демонтировать уже само тяжелое оборудование, а затем окончательно и стены защитного купола. Делать всё это, конечно, должны будут только роботы.
Так что роботы потребуются. Но это должны быть не примитивные малофункциональные змеевидные или "скорпионовидные" роботы, которые только и могут, что смотреть и замерять радиацию (какую-либо другую серьезную работу такие безрукие роботы не выполняют). Это должны быть максимально удобные в дистанционном управлении антропоморфные роботы-аватары, роботы с двумя руками и с двумя ногами.
В другом репортаже Сергея Мингажева о необходимости создания более удобных в управлении роботов как раз говорит генеральный директор АЭС "Фукусима - 1" Акира Оно:
In reality the such, as much as possible convenient in management, robots already for a long time are invented it are anthropomorphous robots-avatars.
In more detail the method of a dismantle of an emergency reactor is illustrated on separate Web page, which you can open by means of figure - hyperlink # 61.
На самом деле такие, максимально удобные в управлении, роботы уже давно изобретены - это: антропоморфные роботы-аватары.
Более подробно метод демонтажа аварийного реактора иллюстрирован на отдельной Web странице, на которую можно перейти с помощью рисунка - ссылки № 61.
Under action of radiation any electronics degrades and by virtue of it is complex to create the robot, which absolutely invulnerable for radiation. Therefore it is very important how much the robot will convenient in management, how much he high-speed - whether will the robot have time to make something useful before he will break. I.e. whether will robot have time to overcome on the way blockages and to arrive to a zone of work, whether he will have time to open the faucet, to press the button, to stretch a hose with water... In this connection on Fukushima, possibly, the most effective (convenient in management and, hence, high-speed) will be just the anthropomorphous waterproof robot, operated by means of method, described here.
Под действием радиоактивных излучений любая электроника деградирует и в силу этого сложно создать робота, абсолютно неубиваемого радиацией. Поэтому очень важно насколько робот удобен в управлении, насколько он быстродействующий - успеет ли робот сделать что-нибудь полезное до того как сломается. Т.е. успеет ли робот преодолеть на своём пути завалы и прибыть в зону работы, успеет ли он открыть кран, нажать кнопку, протянуть шланг с водой... В связи с этим на Фукусиме, вероятно, наиболее эффективным (удобным в управлении и, следовательно, быстродействующим) будет антропоморфный герметичный робот-аватар, управляемый описанным здесь способом.
Probably, the given publication will force the Japanese specialists and government to discard own political (nationalistic) ambitions and to recognize obvious fact: the Japan have big need in the anthropomorphous robot-avatars, which man will can distantly control.
I.e. the Japan need the robots-avatars, which will have remote control only by means of the technology, described in the Russian patent # 2134193 ru.
Возможно, данная публикация заставит японских специалистов и правительство отбросить политические (националистические) амбиции и признать очевидное: Японии необходим управляемый дистанционно антропоморфный робот-аватар, максимально дешевый и простой.
Т.е. Японии нужен робот-аватар, управляемый именно с помощью технологии, описанной в российском патенте № 2134193 ru.
From of all aforesaid we can draw a conclusion:
Из всего вышесказанного сделаем вывод:
or Japanese use very cheap and very simple in management the anthropomorphous robots-avatar, operated in a fast copying regime, and then these robots will liquidate the this radiation catastrophe on Fukushima, or Japanese continue attempts to manufacture of the expensive and unreliable in conditions of radiation of robots with elements of the artificial intellect, i.e. of the robots, with control by means of buttons, but then already themselves people, citizenry of Japan, in protective suits will liquidate the radiation catastrophe. (In suits which in reality do not protect from the atomic irradiation).
либо японцы делают очень дешевых и очень простых в управлении антропоморфных роботов-аватаров, управляемых в быстром копирующем режиме, и тогда радиационную аварию на Фукусиме будут ликвидировать роботы, либо японцы продолжают попытки создать очень дорогих и ненадежных в условиях радиации роботов с элементами искусственного интеллекта, т.е. роботов, управляемых с помощью кнопок, но тогда радиационную аварию придётся ликвидировать самим людям, гражданам Японии, в защитных костюмах. (В костюмах, которые от радиационного облучения на самом деле не защищают).
Now time for comprehension, that radioactive catastrophe on Fukushima it already not only internal affair of Japan, but also a problem of all world: radiation does not recognize of a national frontiers. The ecological service of the USA made the card of radioactive pollution of Pacific ocean:
Ведь радиоактивная авария на Фукусиме это уже не только внутреннее дело Японии, но и проблема всего мира: радиация не признаёт государственных границ. Вот карта радиоактивного загрязнения Тихого океана, сделанная экологической службой США:
Already is obvious, that we have need in the fastest a dismantle of emergency reactors of Fukushima, it is necessary for all inhabitants of a planet the Earth.
Очевидно, что чем быстрее будут ликвидированы аварийные реакторы Фукусимы, тем будет лучше для всех людей планеты Земля.
The anthropomorphous robots-avatars except of diving business, of military area, of cosmos or liquidation of emergency cases can find uses and in other fields of activity, for example, at development of Arctic regions and Antarctica.
Кроме водолазного дела, военной области, космоса или ликвидации ЧС антропоморфные роботы-аватары могут найти применение и в других сферах деятельности, например, при освоении Арктики и Антарктиды.
Вот, например, видео, где "главный нефтяник России" Игорь Сечин и "главный полярник России" Артур Челингаров, находясь на Севере, кутаются в куртки в ожидании видеоконференции с Путиным:
0С, it is a basic problem.
Besides it the person should eat, sleep, he requires a good conditions of life, health services, entertainments... Work of the person in extreme temperature conditions demands the high remuneration of labour - it all be a seriously defects of human organisms.
Robots not have of all these defects: Robots can work 24 hours per day, 7 days per a week, 365 days per a year at a temperature -400 — -800 C.
And the robots will not ask for annual leave. Robots do not require warm fundamental premises and they not require a good conditions of life, do not require entertainments. Robots do not eat. All it allows to reduce volumes so-called "Northern delivery" - disappears necessity to transport heavy building materials, foodstuffs, fruit - vegetables, medicines. Disappears necessity to use warehouses of foodstuffs... Robots do not go to a toilet, therefore is no necessity to create in places of their dwelling of sewer communications and clearing waste disposal plants against faeces - except for obvious reduction of financial expenses it reduces also pressure upon ecology of northern areas. The medicine do not require for robots (not need in hospitals, medicines and expensive medical equipment) - because, if necessary, robots will be able to quickly repair each other. Robots are not afraid of mosquitoes and midges, which be a lot of in Siberia, are not afraid they and of the tsetse fly, which lives in Africa.
To operate robots it is possible distantly from places with more auspicious (warm) climate where the bulk of the population of the country traditionally lives, people simply do not have necessity to go on north if all work is possible to make distantly - so we have a reduction of a superfluous volume of passenger flow. As a matter of fact the people, which distantly operating by means northern robots, will live in habitual for themselves geographical district and to work in office building with a normal temperature regime +20 — +220 C.
People can remote operate by robots in several working shifts, as it now practises at many factories, therefore the same robot, under control of different people-operators from different time zones, can work in the north round the clock. Will logically correctly to place greater stations of management of northern robots in so-called " depressive regions " (in regions where greater unemployment) - in this region to people-operators who operate northern robots, it is possible to pay the smaller salary, smaller, as compared with metropolitan workers. (In Russia now many such depressive regions, they also are exist and in the USA - Detroit, for example.) Uses of distantly operated robots will lower unemployment in depressive regions, that too is good for economy any country.
Naturally, what such robots should be simple in management and should have an opportunity to use usual "human" tools, the usual "human" vehicles earlier, which already delivered in northern regions.
Obviously, what for a role of such northern robots better will correspond by the distantly operated anthropomorphous robots avatars. These robots have the most convenient intuitive interface of management, described in the patent # 2134193 ru.
The similar logistics of use remote anthropomorphous robots avatars in the revolutionary manner changes strategy of development of cool (or on the contrary torrid) areas of a planet.
It is necessary to notice, that I do not insist on full replacement in the North of people by robots - it we can do only there, where it is expedient. Small amount of people in the North in any case should remain.
0С - это основная проблема.
Кроме того, человек должен есть, спать, он нуждается в хороших бытовых условиях, медицинском обслуживании, развлечениях... Работа человека в экстремальных температурных условиях требует повышенной оплаты труда - всё это серьёзные недостатки человеческих организмов.
У роботов этих недостатков нет: Роботы могут работать 24 часа в сутки, 7 дней в неделю, 365 дней в году при температуре - 400 — -800 C.
И при этом роботы не будут проситься в отпуск. Роботы не нуждаются в теплых капитальных помещениях и в хороших бытовых условиях, не нуждаются в развлечениях. Роботы не едят. Всё это позволяет уменьшить объемы т.н. "Северного завоза" - отпадает необходимость транспортировать тяжелые строительные материалы, продукты питания, фрукты - овощи, лекарства. Отпадает необходимость использовать склады продуктов питания... Роботы не ходят в туалет, а значит, нет необходимости создавать в местах их обитания канализационные коммуникации и очистные сооружения - кроме очевидного уменьшения финансовых затрат это уменьшает и давление на экологию северных районов. Роботы не нуждаются в медицине (в больницах, в лекарствах и в дорогом медицинском оборудовании) - при необходимости роботы смогут быстро ремонтировать друг друга. Роботы не боятся комаров и гнуса, которых очень много в Сибири, не боятся мухи це-це, которая обитает в Африке.
Управлять роботами можно дистанционно из мест с более благоприятным (теплым) климатом, где традиционно проживает основная масса населения страны, людям просто нет необходимости ехать на север раз всю работу можно сделать дистанционно - происходит уменьшение избыточного пассажиропотока. По сути дела люди, дистанционно управляющие северными роботами, будут жить в привычной для себя местности и работать в офисе с обычным температурным режимом +20 — +220 C.
Люди смогут дистанционно управлять роботами в несколько смен, как это практикуется на многих заводах, поэтому один и тот же робот под управлением разных операторов из различных часовых поясов сможет на севере трудиться круглосуточно. Имеет смысл размещать большие станции управления северными роботами в т.н. "депрессивных регионах" (в регионах, где большая безработица) - там людям-операторам, которые управляют северными роботами, можно платить меньшую зарплату, меньшую, по сравнению со столичным работникам. (В России сейчас много таких депрессивных регионов, есть они и в США - г. Детройт, например.) Применение дистанционно управляемых роботов снизит безработицу в депрессивных регионах, что тоже хорошо для экономики любой страны.
Естественно, что такие роботы должны быть просты в управлении и должны иметь возможность пользоваться обычными "человеческими" инструментами, обычными "человеческими" транспортными средствами, ранее уже завезенными в северные регионы.
Очевидно, что на роль таких северных роботов лучше всего подойдут антропоморфные дистанционно управляемые роботы-аватары, имеющие наиболее удобный интуитивный интерфейс управления, описанный в патенте № 2134193 ru.
Подобная логистика использования дистанционных антропоморфных роботов-аватаров революционным образом меняет стратегию освоения холодных (или наоборот жарких) районов планеты.
Следует заметить, что я не настаиваю на полной замене на Севере людей роботами - это следует делать лишь там, где это целесообразно. Какое-то количество людей на Севере в любом случае должно будет остаться.
obvious opinions about development of Arctic regions by means of robots - avatars
очевидные соображения об освоении Арктики с помощью роботов-аватаров
the anthropomorphous robots-avatars anthropomorphic avatar robots
In many cases, robots can successfully replace astronauts and make people's work safer.
In addition, such additional members of space missions as robots will not need oxygen to breathe, they will not need water, food, toilets ... - this reduces the mass of the load that must be put into orbit of the Earth by means of rockets.
Therefore, the desire of many countries to replace people in outer space with robots is quite natural.
And even already Rogozin says about it to Putin, the Americans and the Japaneses are engaged in the appropriate scientific developments:
Роботы же во многих случаях могут с успехом заменить космонавтов, сделать труд людей безопасней.
К тому же таким дополнительным членам космических миссий, как роботы, будет не нужен для дыхания кислород, будут не нужны вода, пища, туалеты… - это снижает массу нагрузки, которую необходимо выводить ракетами на орбиту Земли.
Поэтому вполне закономерно желание многих стран по-возможности заменить людей в открытом космосе роботами.
Вот и Рогозин говорит об этом Путину, американцы и японцы занимаются соответствующими разработками:
Thus, the robots avatars along with powerful rockets will become the factor determining domination in space race and in development of mineral resources of World ocean.
Таким образом, роботы-аватары наряду с мощными ракетами станут фактором определяющим доминирование в космической гонке и в освоении минеральных ресурсов Мирового океана.
The answer has come from Roscosmos relative to the offer to experts be familiarized with my Web sites:
Из Роскосмоса пришёл ответ на предложение ознакомиться с моими сайтами:
какому-нибудь Илону Маску, который тоже одно время задумался о создании роботов. Только он лишь слегка перекурит после создания ракеты „Дракон“ (т.н. „батута“) и, несомненно, немного погодя вернётся к этому вопросу:
It is necessary to remind, that astronauts at long stay in weightlessness daily should train on special simulators for support of their own physical form (otherwise later at returning on the surface of Earth the astronauts will have problems with health). However obviously what the astronauts in the future can carry out the daily such trainings by means the mechanism of management by the anthropomorphous robot:
Следует напомнить, что космонавты при длительном пребывании в невесомости должны ежедневно тренироваться на специальных тренажёрах, чтобы поддерживать свою физическую форму (иначе позже при возвращении на землю у космонавтов возникнут проблемы со здоровьем). Так вот, в будущем космонавты могут проводить свои ежедневные тренировки в механизме управления антропоморфным роботом:
Such a decision will allow saving a place (working space) on spacecrafts - we jettison the simple simulator and place into this place the universal mechanism of management by the anthropomorphous robot. But later if astronauts are necessary to do work outside a spacecraft then they can use the same most universal support mechanism of the body the person-operator already and for management by the anthropomorphous robot-astronaut. Else the examples of the use of gimbal (gyroscopic) support mechanisms for cases of VR simulation of movements in space flight and in military aviation:
Такое решение позволит сэкономить место (рабочее пространство) на космических кораблях - мы выкидываем за борт простой тренажер и устанавливаем на его место универсальный механизм управления антропоморфным роботом. Ну, а потом, при необходимости выполнения работ за пределами космического корабля, космонавты смогут использовать этот же самый универсальный механизм подвеса тела человека-оператора уже и для управления антропоморфным роботом-космонавтом. В качестве примеров использования карданных (гироскопических) механизмов подвеса можно привести случаи VR моделирования перемещений в космическом полете и в военной авиации:
And even the highest hierarchs of the Church bless the technology "Anthropomorphic robot avatar"!:
И даже высшие иерархи церкви благословляют технологию "Антропоморфный робот-аватар"!:
Huge Military Humanoid Robots greater robots
ОБЧР ("Огромные Боевые Человекоподобные Роботы")
Конечно, это была шутка, но сейчас начали появляться проекты таких больших роботов:
huge military humanoid robots robots robots robots Greater robots the anthropomorphous robots-avatars of the normal "human" sizes - up to 2 meters of growth.
However, greater humanoid robots
огромные боевые человекообразные роботы роботы роботов Большие роботы антропоморфные роботы-аватары нормальных "человеческих" размеров - до 2 метров роста.
большие человекообразные роботы
the robots
роботом
Big robot the BIG robot the big robot robot the robot the remote management of the big humanoid robot, the patent for invention # 2134193 ru.
БОЛЬШОЙ робот у большого робота робота робота дистанционном управлении человекообразным роботом, № 2134193 ru.
The technology of the remote-controlled anthropomorphous robot avatar can make absolutely safe a profession of the miner. And then it is not necessary to carry out „Analysis of situation“ after the next accident in the shaft with human victims anymore:
Технология дистанционно управляемого антропоморфного робота-аватара может сделать профессию шахтёра абсолютно безопасной. И тогда больше не придется проводить „Разбор полётов“ после очередной катастрофы на шахте с человеческими жертвами:
the support mechanism, which was described in the patent # 2134193 ru, can find use and in show business (for penetration into a so-called virtual reality or in fashionable nowadays "Metaverse")
механизм подвеса, описанный в патенте № 2134193 ru, может найти применение и в индустрии развлечений (для проникновения в т.н. виртуальную реальность или в модную ныне „Метавселенную“)
However only the support mechanism, presented in the patent for the invention # 2134193 ru, can provide to admirers of computer games the most qualitative immersing in the virtual reality.
Однако только механизм подвеса, представленный в патенте на изобретение № 2134193 ru, может обеспечить игроманам самое качественное погружение в виртуальный мир.
here the technology "Remote-controlled anthropomorphic robot avatar" is best suited.
You can, for example, to absolutely safely participate in medieval knightly tournament (without any rules) or in any other battle.
здесь технология „Дистанционно управляемый антропоморфный робот-аватар“ подойдет наилучшим образом. Можно, например, абсолютно безопасно поучаствовать в средневековом рыцарском турнире (без всяких правил) или в каком-нибудь другом баттле:





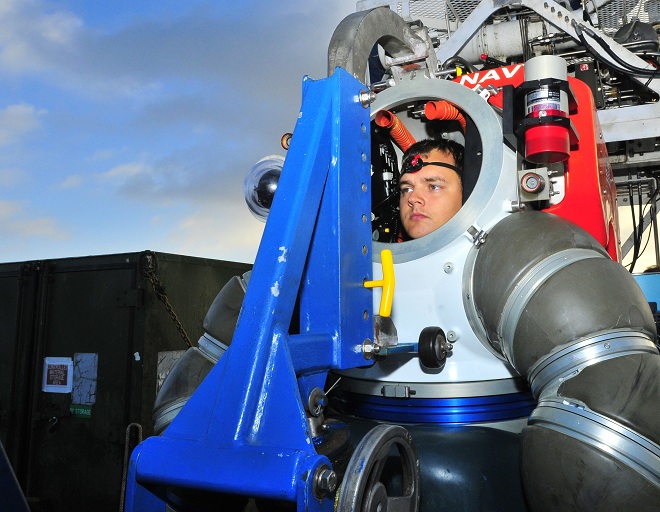
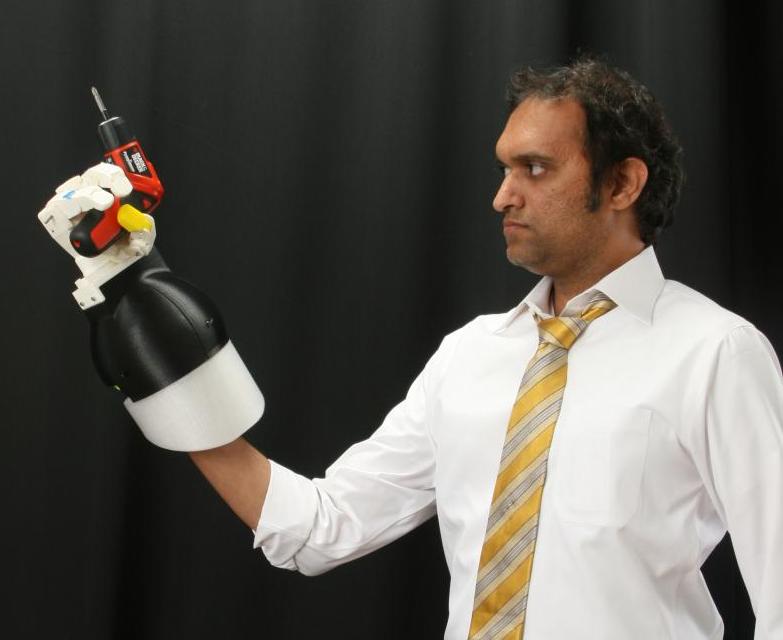













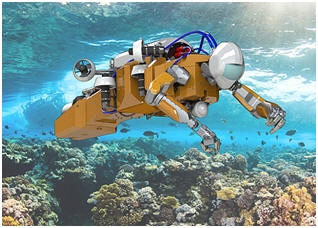
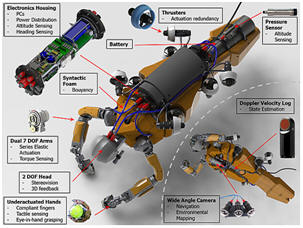

















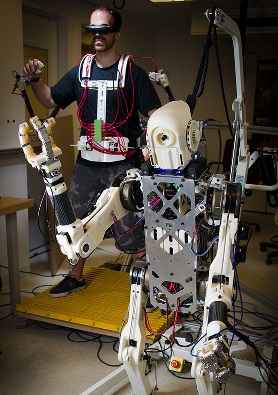


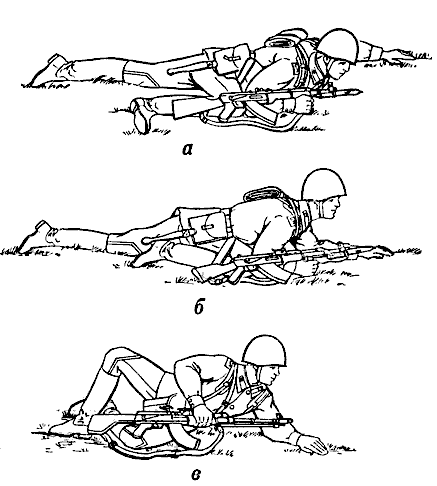
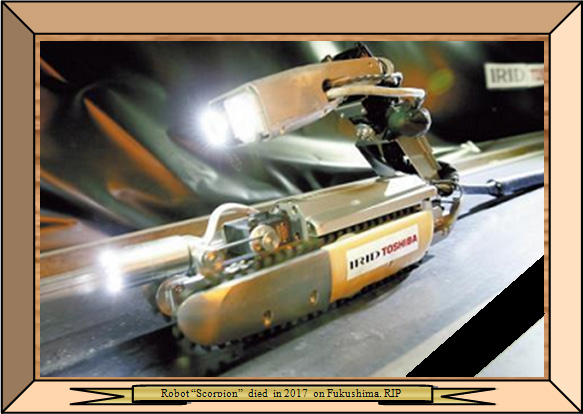


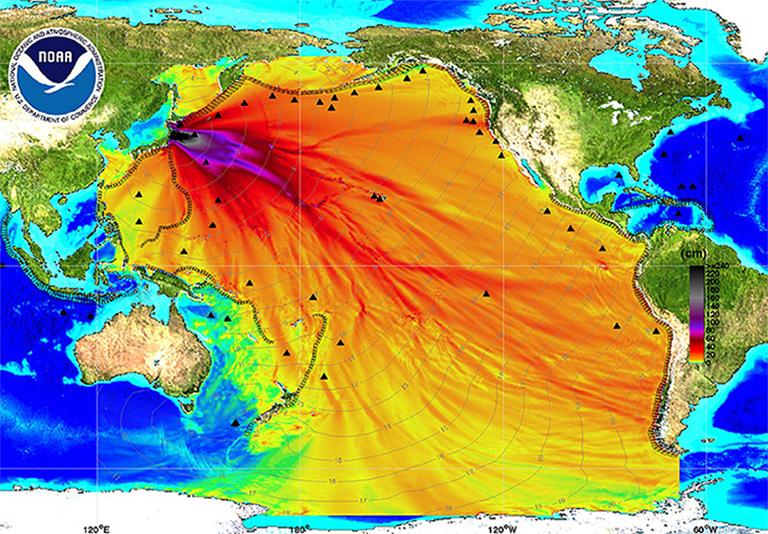



































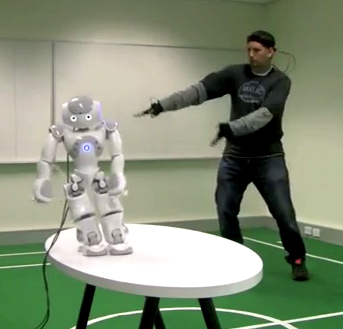







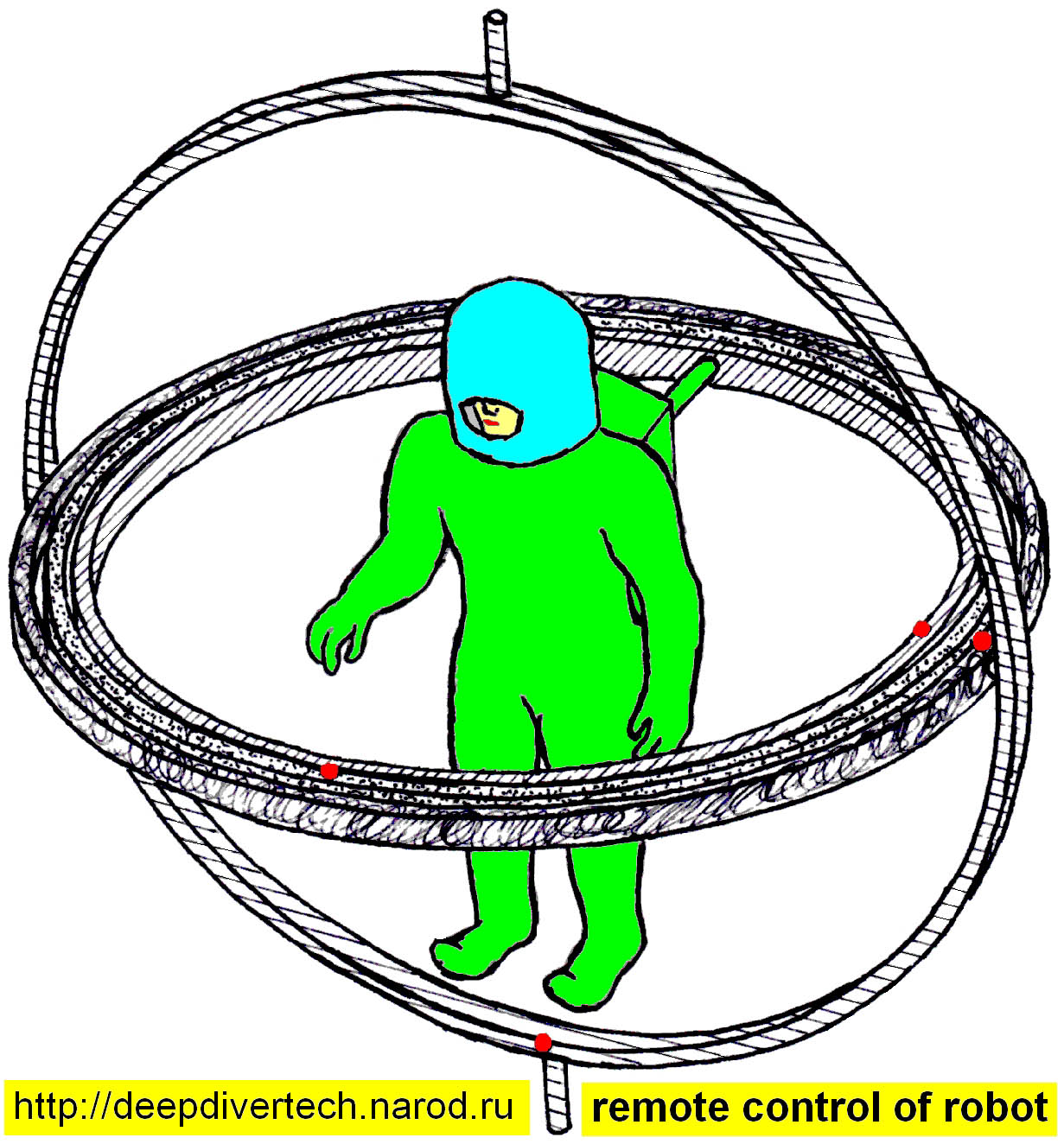{kind=link}
{kind=link}